
Inland Vessel Navigation im Zusammenhang mit Lehre und Forschung
Die Arbeitsgruppe Positionierung und Navigation (PosNav) befasst sich seit gut anderthalb Dekaden mit der Verbesserung der GNSS-basierten Positionierung und der Forschung innovativer sowie alternativer Strategien zur Navigation. Unsere Entwicklungen werden durch besondere Experimente validiert und in eigener Auswertesoftware implementiert und validiert.
Die Forschungsthemen sind vielfältig: GNSS-Navigation und Positionierung mit Atomuhren, Kollaborative Positionierung, GNSS-Antennenkalibrierung und Modellierung der GNSS-Signalausbreitung mit Analyse von deren Auswirkungen auf die geodätischen Schätzparameter (Position, Troposphäre, Mehrdeutigkeiten, etc.). Auch die Forschung zur Integrität mittels Intervallmathematik, die Inertialnavigation, sowie die Entwicklung stochastischer Modelle und Filteralgorithmen gehören zu den seit vielen Jahren erfolgreich bearbeiteten Forschungsfeldern.
Ein integraler Bestandteil ist dabei die Weiterentwicklung von Soft- und Hardware zur Umsetzung und Validierung alternativer Ansätze oder zur Verbesserung vorhandener Konzepte innerhalb der GNSS-Prozessierung.
In diesem Zusammenhang wurde u.a. der virtuelle Empfänger für das „Bürgernahe Flugzeug“ entwickelt und für die Navigation neuer Flugzeug-Landekonzepte gemeinsam mit dem Institut für Flugführung (IFF) implementiert und umgesetzt. Dieser Ansatz besteht in einer Kombination optimal auf dem Flugzeugrumpf verteilter GNSS-Antennen, die rechnerisch zu einer einzigen Antenne kombiniert werden und die Satellitenverfügbarkeit bei Situationen hochdynamischer Landeanflüge optimieren.
Im Rahmen der universitären Ausbildung haben wir diesen Ansatz auf die Navigation von Binnenschiffen erweitert. Derzeit ist eine kontinuierliche Positionslösung mit GNSS allein nicht möglich. Aktuelle Routenführungen basieren auf einer einfachen Inertialeinheit, kombiniert mit RTK-Korrekturen zur trägerphasenbasierten Ortung und einem kartenbasierten Matching.
Notwendige Assistenz- und Automatisierungsprozesse in der Binnenschifffahrt benötigen allerdings eine kosteneffiziente und integre Positionslösung.
Zur Erhebung einer geeigneten Datengrundlage wurde die “MS Wissenschaft” mit einer Vielzahl von GNSS- und Inertialsensoren ausgestattet und vorhandene Hebelarme exakt vermessen. Die „MS Wissenschaft“ fährt als Ausstellungsschiff im Auftrage des Bundesministeriums für Bildung und Forschung (BMBF) mit jährlich wechselndem Themenschwerpunkt als mobile Ausstellung durch Deutschland.
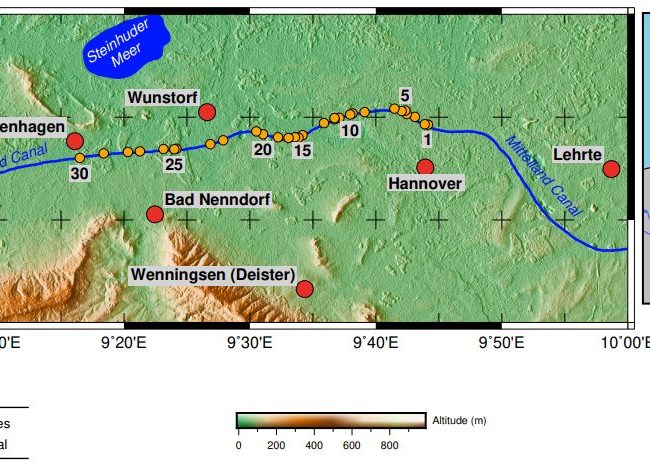
Die Daten wurden zwischen Hannover und Minden auf dem Mittellandkanal aufgenommen. In diesem Abschnitt befinden sich ca. 50 Brücken, die zu kompletten GNSS-Signalverlusten führen.
Als Mehrantennensystem wurden ein JAVAD Sigma mit 4 GrAnt-Antennen in Kombination mit einem JAVAD Delta-G3T-Empfänger von ALLSAT in einem rechnerischen Ensemble vereint. Die Hebelarme auf dem Versuchsträger wurden mit einer Leica TS16 Totalstation zusammen mit einer Leica GS18T vermessen. Als Referenzlösung war eine Inertialmesseinheit (Imar FSAS) auf dem Schiff installiert.

Auf Basis von GNSS-Daten (GPS, GLONASS, Galileo) hatten die Studierenden der Fachrichtung Geodäsie und Geoinformatik an der Leibniz Universität Hannover im Rahmen eines einjährigen Projektseminars den Auftrag, sich mit der Konzeption und der Analyse von Signalcharakteristiken der Träger- und Codephase auseinander zu setzen, den Ansatz des virtuellen Empfängers zu implementieren und die Eignung der Trägerphasen zu bewerten.
Im Ergebnis wurde festgestellt, dass das eingesetzte Mehrantennensystem die Verfügbarkeit der sichtbaren Satelliten nachhaltig verbessert und bei herausfordernden Schiffspassagen (Brückendurchfahren, etc.) kontinuierliche Positionsschätzungen liefern kann. Weiterhin reduziert eine Überbrückung von Beobachtungen zwischen zwei und mehr Antennen die Signalunterbrechungen und bietet eine kontinuierliche Navigationslösung unter kritischen Sichtbedingungen. Die Untersuchungen zeigten, dass insbesondere das Rauschen der Positionslösung um 0,3-0,4 m reduziert werden konnte.
Mit dem Konzept konnte die Positionslösung bis zu 94,5 % im Vergleich zur klassischen Einzelpunktlösung verbessert werden. Die gesamte Positionierungsleistung liess sich sogar um bis zu 80 % optimieren.

Im Rahmen dieser Projektseminare werden immer wieder verschiedene Produkte von JAVAD GNSS und Leica Geosystems für die Aus- und Weiterbildung von Studierenden anhand von praxisrelevanten und praxisnahen Projekten durchgeführt. Hierzu gehörten in diesem Projekt die Aufmessung des Schiffes (Navigationsplattform/Hebelarme) sowie wissenschaftlich ausgewertete GNSS-Trajektorien (aus RTK und GNSS-Rohdaten), mit denen die Studierenden gearbeitet haben bzw. die sie verarbeitet haben. Das Projekt entstammt dem Kontext „Digitale Schifffahrt“ und „Navigation und Steuerung von Asisstenzsystemen von Binnenschiffen“.
Die Zusammenarbeit zwischen der ALLSAT und dem Institut für Erdmessung (IfE) der Leibniz Universität Hannover hat eine lange Tradition und dient auch in Zukunft der aktiven Nachwuchsförderung über die Ausbildung der Universität, an der eine große Anzahl aktiver und ehemaliger ALLSAT-Mitarbeiter ihre wissenschaftlichen Abschlüsse erhielten.
Hier finden Sie weitere spannende Arbeiten aus Lehre und Forschung der Fachrichtung Geodäsie und
Geoinformatik an der Leibniz Universität Hannover:
von Tobias Kersten (Institut für Erdmessung)
Fotos: Kersten, CC-BY-SA 4.0 creative commons.

