
AeroInspekt – Millimetergenaue Bestimmung von Gleisgeometrien in voll automatisierten Containerterminals mittels UAV-Photogrammetrie

Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren
Voll automatisierte Lagerblöcke sind das Herzstück moderner Containerterminals, denn erst sie ermöglichen im Rahmen des 24/7-Regelbetriebs die Umsetzung einer effizienten Containerlogistik. Jede Unterbrechung dieses Betriebs (z.B. für Wartungs- oder Vermessungsarbeiten) stellt unter betriebswirtschaftlichen Gesichtspunkten einen erheblichen Verlust für die Betreibergesellschaft dar. Die korrekte Geometrie der einzelnen Gleise bzw. Kranbahnen in diesen Containerterminals muss turnusmäßig mit hoher Genauigkeit überprüft werden, da die Krane hohe Lasten transportieren und der Untergrund in direkter Wassernähe i.d.R. ohnehin einer signifikanten Setzung unterliegt. Eine nicht mehr korrekte Gleisgeometrie muss über Sanierungsmaßnahmen nachjustiert werden, da dies ansonsten zu Schäden an den Kranen und damit auch zu einem kompletten Stillstand in der Lagerlogistik des entsprechenden Blocks führen kann.
Aktuelle Messmethoden mit sog. Robotikstationen in Kombination mit Schienenmessfahrzeugen sind zeit- und damit kostenintensiv, denn die Verladeaktivität der Krane muss in diesen Bereichen zumeist für einen Arbeitstag stillgelegt werden. Jeder Stillstand im Containerumschlag führt zu erheblichen Umsatzeinbußen.
In dem hierzu durchgeführten Projekt wurde ein Ansatz gewählt, in dem durch den Einsatz eines auf Drohnen basierenden Messsystems dieser Stillstand, bei gleicher oder besserer Güte der Vermessungsergebnisse im Vergleich zu den aktuellen Verfahren, minimiert werden sollte. Hierzu wurde über die involvierten Projektpartner Hamburger Hafen und Logistik AG (HHLA), Technische Universität Braunschweig (Institut für Flugführung -IFF- und Institut für Geodäsie und Photogrammetrie -IGP-) sowie die Gravionic GmbH (eine Ausgründung aus dem IFF) ein UAV-basiertes Forschungsprojekt erfolgreich umgesetzt. Diese Messmethode ist auch während des laufenden Betriebs möglich und liefert zudem als Nebenprodukt flächendeckende 3D-Ergebnisse für Bereiche im Umfeld der Kranbahnen. Ein Schwerpunkt der Arbeiten lag auf der Automatisierung des UAV-Betriebs in unmittelbarer Nähe der autonom fahrenden Krane sowie der anschließenden 3D-Datenverarbeitung und -Auswertung mit bis dato durch UAV-Photogrammetrie unerreichter Genauigkeit. Der Einsatz dieses innovativen Systems wird die Betriebszeit und Kapazität von Containerterminals während notwendiger Vermessungsarbeiten deutlich erhöhen. Dieses Projekt hatte insbesondere die folgenden vier Forschungsschwerpunkte:
Inspekt-ONE: Hochauflösendes Luftbild-Photogrammetrie-System
Drohnenbasierte Luftbildphotogrammetrie hat in den letzten Jahren stets wachsende Bedeutung gewonnen, üblicherweise mit einer erreichbaren Bodenauflösung von bis zu 1 cm. Diese Systeme stellen derzeit eine effiziente Messtechnik für die topographische Vermessung von kleinräumigen Gebieten in der Größenordnung von einigen Hektar bis wenigen Quadratkilometern dar. Um eine Millimetergenauigkeit zu erreichen, wurde die Mittelformatkamera Phase-One iXM 100 mit einem RSM-150mm Objektiv in Kombination mit einer DJI Matrice M600 Pro verwendet. Trotz der im Projekt gewählten Flughöhe von 35 m ist mit diesem System eine photogrammetrische Vermessung mit einer Boden- bzw. Objektauflösung von unter 1 mm erreichbar.

Inspekt-GCP: Millimetergenaues GCP-Netz
Um die dreidimensionalen UAV-Daten millimetergenau mit dem geodätischen Referenzsystem der HHLA zu verbinden, wurden speziell entwickelte Hybrid Marker im weiteren Umfeld und neben dem Gleisbett als Ground Control Points (GCP) installiert. Mit einer Kombination aus Prismen und maschinell bearbeitbaren optischen Markern können diese sowohl vom Boden aus mit einer Robotikstation vermessen als auch in den Luftbildern automatisch erkannt und in die Datenprozessierung mit einbezogen werden.
Vor Ort wurden eine SOKKIA NET AX II Robotikstation und ein LEICA MULTISTATION 50 in Verbindung mit der GART-Vermessungssoftware der ALLSAT und einer anschließenden Netzausgleichung mit PANDA für die hochgenaue Einmessung der temporären GCP in das geodätische Netz verwendet.

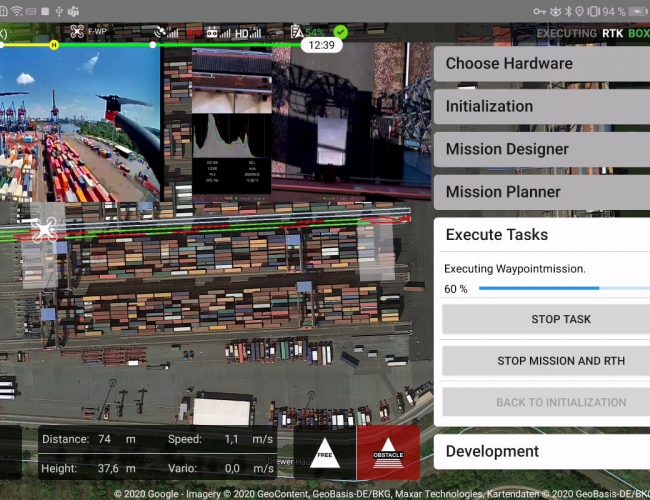
Inspekt-GS: Reaktive Einsatzplanung in dynamischer Umgebung
Eine vollständige Kartierung des Messbereichs erfordert ausreichend überlappende Bilder mit möglichst nicht-abgeschatteter Sicht auf die Schienen. Der kontinuierliche Betrieb der Krane führt jedoch dazu, dass ein erheblicher Teil des Messbereichs durch Krane verdeckt wird, was zum Verlust von für die Auswertung relevanten Informationen führt. Die im Rahmen des Projekts eigens entwickelte Ground-Control-App Inspekt-GS löst dieses Problem durch die Implementierung einer automatisierten Reaktiv-Flugplanung. Sie erkennt relevante Hindernisse mittels eines “RTK-Kranmarker” (und dies teils in Verbindung mit einem Machine-Learning-Ansatz) noch während der Ausführung einer Flugmission. Die entsprechend detektierten Abschnitte werden automatisiert erneut überflogen, bis der benötigte Datensatz entsprechend der Planungsvorgaben vollständig ist.
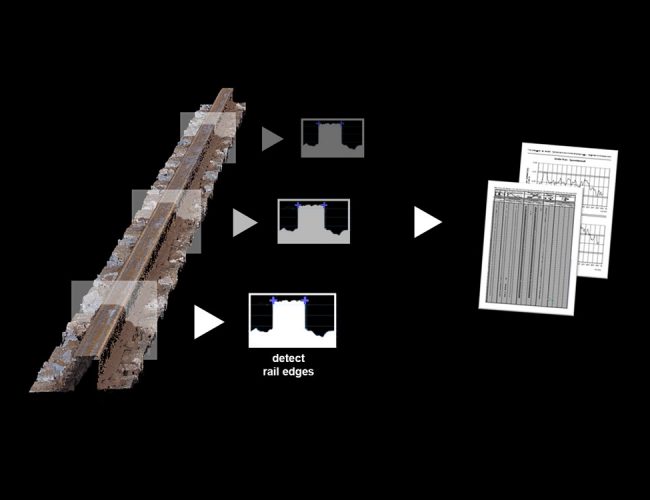
Inspekt-XT: Automatisierte Analyse von Luftbildern zur Extraktion von 3D-Geometrien
Die georeferenzierten Bilddaten aus dem UAV-Befliegung werden im Büro mit einer speziellen Photogrammetrie-Software verarbeitet, um eine 3D-Punktwolke und ein digitales Höhenmodell zu erzeugen. Das Programm Inspekt-XT wurde zur Extrahierung der erforderlichen 3D-Schienengeometrie aus dem digitalen Höhenmodell entwickelt. Das Programm berechnet die 3D-Schienenlage durch Extraktion von 2D-Schienenprofilen in periodisch erzeugten Querschnitten und schreibt sie in ein Messbericht, mit dem die zuständige Betriebsstelle eventuelle Grenzwertüberschreitungen, die den Betrieb stören könnten, rechtzeitig erkennen und entsprechende Maßnahmen ergreifen kann.
Mit dem für AeroInspekt aufgebauten Messystem gelang es außerdem, die Bodenbeschaffenheit bzw. Topographie der angrenzenden Flächen hochgenau zu vermessen, also jener Bereiche in denen autonome Fahrzeuge (AGV) die Container zwischen der Pier und den Blocklagern hin- und herfahren. Die sich mit der Zeit quasi immer tiefer einfräsenden Spurrillen der AGV verursachen ab einer gewissen Tiefe eine Sanierungsbedürftigkeit der gesamten Fläche. Die Tiefe dieser Spurrillen wurde bisher aufwändig mittels terrestrischem Laserscanning in charakteristischen Teilflächen mit entsprechenden Stillstandszeiten im laufenden Betrieb ermittelt. Die gleiche und teils sogar bessere Genauigkeit und eine deutlich größere Detail- und dabei insbesondere Tiefentreue wurde mittels unseres eingesetzten UAV-Systems erzielt, und dies ohne Stillstand im laufenden Betrieb zu verursachen.
Die seitens der HHLA-Betreibergesellschaft geforderten Genauigkeiten wurden erreicht und im Vergleich zu den aktuellen Verfahren sind die Ergebnisse zudem flächendeckend verfügbar. Die verursachte Stillstandszeit im Block konnte von einem Arbeitstag auf etwa eine Stunde minimiert werden. Diese Stunde wird noch für den Auf- und Abbau der temporären GCP im Block benötigt. Durch den perspektivischen Einbau permanenter GCP würden diese Stillstandszeiten gänzlich entfallen. Das in diesem Forschungsprojekt entwickelte System hat sich bewährt, dennoch gibt es Spielraum für weitere sinnvolle Modifikationen. Für den industriellen Einsatz im Bereich der Kranbahnvermessung in voll automatisierten Containerterminals sowie der topographischen Vermessung der AGV-Flächen ist es jetzt bereits effizient verwendbar; weitere Anwendungsgebiete – von komplexen Gleissystemen bis hin zu Brücken und anderen Bauwerken – werden untersucht.
Autoren: Yogesh Khedar (IFF TUBS), Yahya Ghassoun (IGP TUBS), Jan Backhaus (IFF TUBS), Ralf Heyen (Gravionic GmbH)
Ansprechpartner: ralf.heyen@gravionic.com
Liste der wissenschaftlichen Publikationen:
- Gerke, M.; Ghassoun, Y.; Alamouri, A.; Bobbe, M.; Khedar, Y.; Plöger, F. „Hochpräszise Objekterfassung mit UAV am Beispiel einer Gleisanlage“
- Gerke, M.; Ghassoun, Y.; Alamouri, A.; Bobbe, M.; Khedar, Y.; Plöger, F. “High-Precision Object Delineation with UAV-Demonstrated on a track System” ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 2020, 293–299.
- Bobbe, M.; Khedar, Y.; Backhaus, J.; Gerke, M.; Ghassoun, Y.; Ploger, F. “Reactive Mission Planning for UAV based crane rail inspection in an automated Container Terminal” International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020.
- Ghassoun, Yahya and Gerke, Markus and Khedar, Yogesh and Backhaus, Jan and Bobbe, Markus and Meissner, Henry and Tiwary, Prashant Kumar and Heyen, Ralf “Implementation and Validation of a High Accuracy UAV-Photogrammetry Based Rail Track Inspection System” MDPI Remote Sensing, 2021, Volume 13, Number 3

https://www.tu-braunschweig.de/iff/forschung/projekte/aeroinspekt
